| |
|||
| Главная | Справочник | Схемотека | Нормативы | Форум | Статьи | Выставки | Пресс-релизы | | |||
| Главная >> Справочник электрика >> Электрические машины >> Асинхронные машины. |
Асинхронные машины. |
|
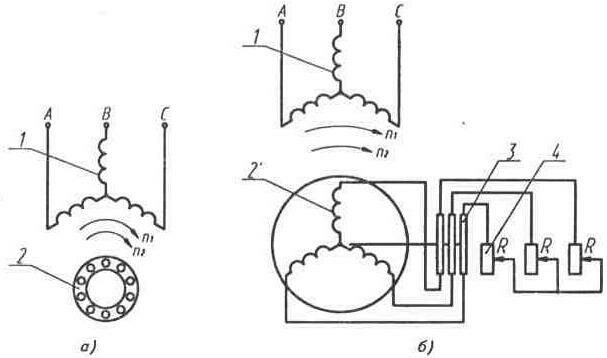
Схема асинхронной машины показана на рис. 2. 15. В схеме асинхронной машины и ее принципе действия есть сходство с трансформатором. Отличие заключается в том, что вторич ная обмотка размещается на вращающемся роторе и не связана с внешней сетью. На схеме рис. 2. 15, а эта обмотка состоит из стержней, замкнутых накоротко, что соответствует двигателю с короткозамкнутым ротором, а в двигателях с фазовым ротором она соединяется с внешними сопротивлениями — рис. 2. 15, б.
Рис. 2. 15. Схемы асинхронной машины: а) асинхронный двигатель с короткозамкнутым ротором; 6) асинхронный двигатель с фазным ротором; 1 — обмотки статора, 2 — ротор с короткозамкнутыми стержнями, 2 — обмотки фазного ротора, 3 — контактные кольца, 4— сопротивления в цепи фазного ротора. Обмотка статора равномерно распределена по его окружности. Обмотки фаз статора соединяются в звезду или в треугольник. При питании трехфазной обмотки статора трехфазным током, создается вращающееся магнитное поле, частота вращения которого n1=60f1/p где f1 — частота тока питающей сети, Гц, р — число пар полюсов обмотки статора. Вращающийся магнитный поток Ф индуцирует в обмотках статора и ротора ЭДС E1 и E2. Под действием ЭДС E2, в обмотке ротора возникает ток I2 при взаимодействии которого с магнитным полем создается электромагнитный вращающий момент М. Величина ЭДС ,E2; и частота ее изменения f2 зависят от скорости пересечения магнитным полем статора Ф витков обмотки ротора. Частоту вращения поля ротора обозначим n2. Частота пересечения магнитным полем статора обмотки ротора является относительной частотой поля статора относительно ротора и равна разности n1— n2. Если разность равна 0, то нет движения поля статора относительно ротора, нет ЭДС E2 и тока I2 и вращающего момента М. При увеличении разности n1 — n2 величины E2, l2, f2 и М увеличиваются. Условием работы асинхронной машины является неравенство частот вращения поля статора и ротора, поэтому машина и называется асинхронной, т. е. несинхронной. Относительная разность частот вращения поля статора и ротора s=n1-n2/n1 называется скольжением. Выражение частоты вращения ротора через скольжение: n2 =n1(1-s). Асинхронные электродвигатели. Серии двигателей. Первая серия асинхронных электродвигателей — серия А — была разработана в 1946-1949 гг. Она состояла из семи габаритов в диапазоне мощностей от 0,6 до 100 кВт. В серии предусмотрены защищенные двигатели типа А и впервые — закрытые обдуваемые типа АО. В серии был предусмотрен ряд модификаций по конструкции и характеристикам. Обозначения в данной серии следующие. Защищенное исполнение. Оболочка чугунная — А, алюминиевая — АЛ. Закрытое обдуваемое исполнение. Оболочка чугунная — АО, алюминиевая — АОЛ. Пример обозначения: А031-4, А032-4, где цифры обозначают: 3 — габарит, или наружный размер статора; 1 и 2 — длина машины; 4 — число полюсов. Новая серия А2 была разработана в 1957-1959 гг. с учетом рекомендаций Международной электротехнической комиссии (МЭК). Серия состояла из девяти габаритов двигателей с высотами оси вращения от 90 до 280 мм, шкалы мощностей из 19 ступеней от 0,6 до 100 кВт. Обозначения двигателей серии А2 такие же, как и серии А, только после А стоит цифра 2. Для различных условий работы имеются модификации двигателей. По исполнению двигатели могут быть в химостойком А02...Х, влагоморозостойком А02...ВМ, сельскохозяйственном А02...СХ исполнениях. Другие модификации обозначаются: П — двигатели с повышенным пусковым моментом; С — с повышенным скольжением; К — с фазным ротором. Электродвигатели с повышенным скольжением предназначены для привода механизмов с большими массами и неравномерным ударным характером нагрузки, с большой частотой пусков и реверсов. Двигатели не имеют твердой шкалы мощностей.
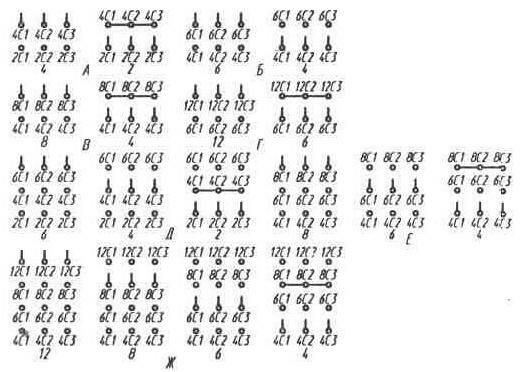
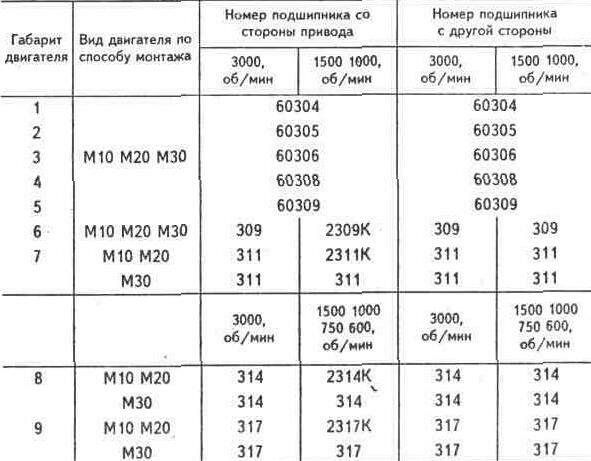
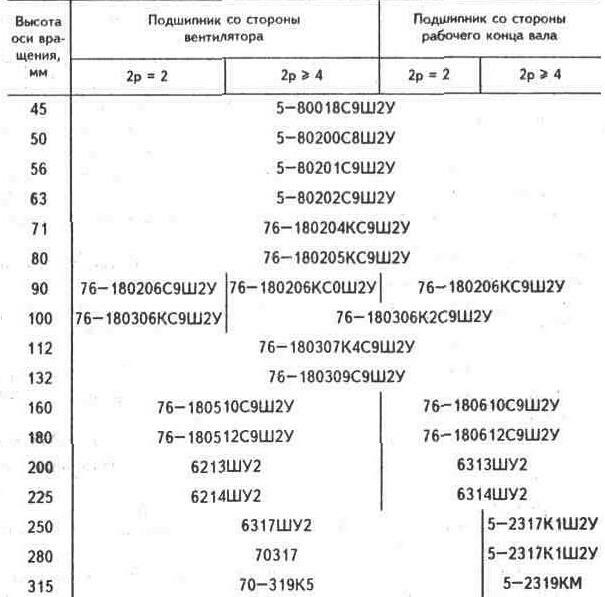
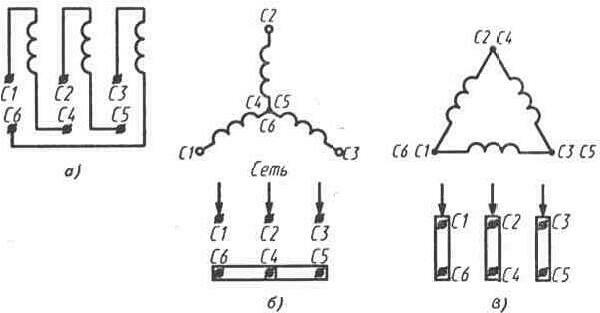
Рис. 2.16. Схемы присоединения выводных концов многоскоростных электродвигателей для получения различных частот вращения: Цифры под схемами показывают количество полюсов обмотки, получаемое при данной схеме. Буквы под схемами означают: А-Г— двухскоростные двигатели, Д, Е — трехскоростные двигатели, Ж — четырехскоростные двигатели. Многоскоростные электродвигатели предназначены для привода механизмов со ступенчатым регулированием частоты вращения и не имеют твердой шкалы мощностей. Схемы включения многоскоростных электродвигателей приведены на рис. 2.16. Цифры под каждой схемой означают число полюсов обмотки статора, которое соответствует данной схеме и определяет синхронную частоту вращения двигателя. Как известно, синхронная частота вращения двигателя, т. е. частота вращения магнитного поля статора n=60f /p где f= 50 Гц — частота сети, р — число пар полюсов. По этой формуле можно определить синхронную частоту вращения двигателя для каждой схемы включения при известном числе пар полюсов, соответствующих данной схеме включения многоскоростного двигателя. Номера подшипников двигателей данной серии приведены в табл. 2.34. Таблица 2.34 ПОДШИПНИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ СЕРИИ А02
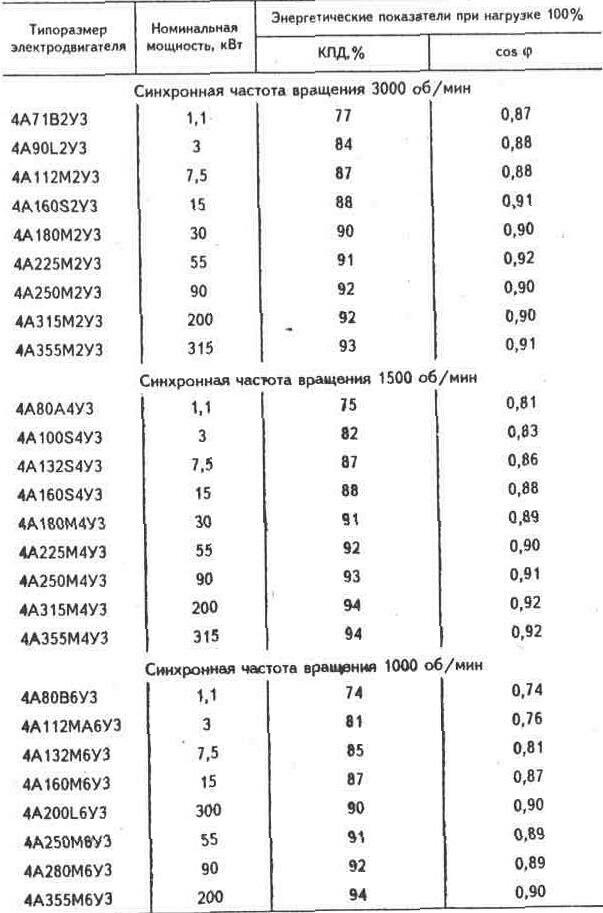
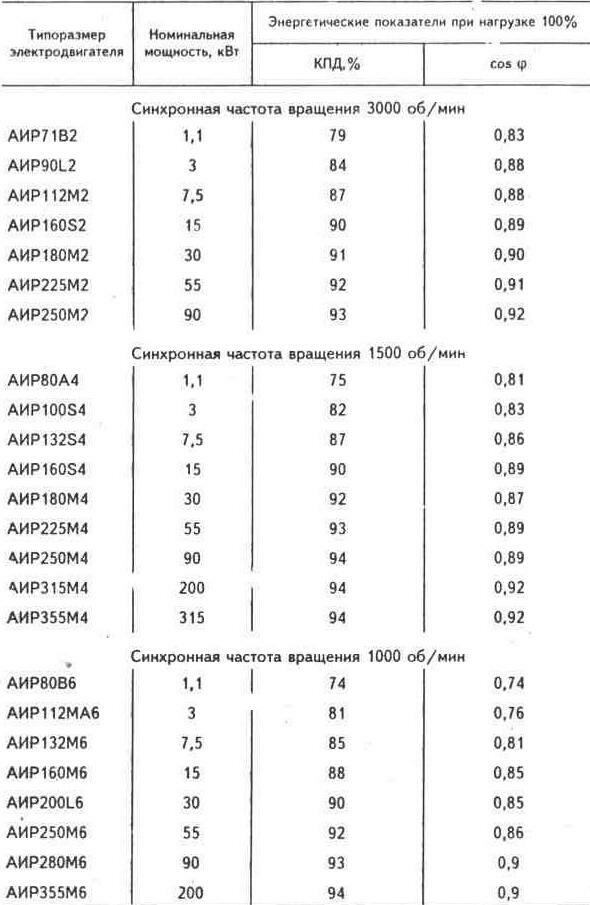
Примечание: способы монтажа: М10 — на лапах, М20 — на лапах и с фланцем, МЗ0 — с фланцем. Электродвигатели серии 4А На основе международных рекомендаций в странах — членах бывшего Совета экономической взаимопомощи (СЭВ) в 1969—1972 гг. были разработаны новые серии электродвигателей, а в СССР — серия 4А. Серия включает все двигатели общего назначения мощностью до 400 кВт напряжением до 1000 В. В серии повышена мощность двигателей при тех же высотах оси вращения на 2...3 ступени по сравнению с двигателями серии А02 за счет применения новых материалов и рациональной конструкции. Впервые в мировой практике в серии были стандартизированы показатели надежности. Серия имеет модификации и специализированные исполнения. По степени защиты предусмотрены исполнения IP44 и IP23. Пример обозначения типа двигателя: 4АН200М4УЗ, где 4 — номер серии, А — асинхронный, Н — степень защиты IP23, для закрытых двигателей обозначение не дается, далее может быть буква А, означающая алюминиевые станину и щиты, х — алюминиевая станина и чугунные щиты, если станина и щиты чугунные, никакого обозначения не дается, 200 — высота оси вращения, мм, М или S, L — условная длина станины. Далее возможны буквы А или В, обозначающие длину сердечника статора, отсутствие букв означает одну длину в установочном размере, 4 — число полюсов, У — для умеренного климата, 3 — категория размещения. Специализированные исполнения двигателей по условиям окружающей среды: тропического исполнения Т, буква ставится после числа полюсов, например, 4A132S2T2, категории размещения 2 и 5; для районов с холодным климатом исполнения ХЛ, например, 4А132S2ХЛ2, категории размещения 2 и 5; химически стойкого исполнения X, например, 2А90L2ХУ5, категории размещения 3 и 5; сельскохозяйственного исполнения СХ, например, 4А160М4 СХУ2, категории размещения 1—5. Технические данные некоторых двигателей серии 4А приведены в табл. 2.35. Модификации двигателей: двигатели с повышенным пусковым моментом; с повышенным скольжением; многоскоростные, с фазовым ротором, двигатели с встроенным электромагнитным тормозом. Таблица 2.35 ТЕХНИЧЕСКИЕ ДАННЫЕ НЕКОТОРЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ СЕРИИ 4А
Приняты следующие классы изоляции обмоток двигателей: высота оси вращения 56,63 мм — Е, высота оси вращения 71...132 мм — В, высота оси вращения 160...355 мм — F. Номера подшипников двигателей показаны в табл. 2.36. Таблица 2.36 ПОДШИПНИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ СЕРИИ 4А
Унифицированная серия асинхронных двигателей Интерэлектро АИ Серия разработана в рамках международной организации Интерэлектро, объединявшей электротехников стран — бывших членов СЭВ. Координатором работ по созданию серии был СССР. Разработаны и выпускаются различные модификации двигателей в зависимости от условий среды и назначения. Двигатели выполняются в основном со степенями защиты IР54 или IР44, а при высотах осей вращения 200 мм и более — со степенью защиты IР23. Конструктивное исполнение машин обозначается буквами IМ с четырьмя цифрами. Первая цифра обозначает группу конструктивных исполнений: 1 — на лапах, с подшипниковыми щитами; 2 — на лапах, с фланцем на щите или щитах; 3 — без лап, с подшипниковыми щитами и с фланцем на одном щите. Вторая и третья цифры обозначают способ монтажа, четвертая — исполнение конца вала. Двигатели серии имеют ряд мощностей диапазоном от 0,025 до 400 кВт, ряд высот осей вращения — от 45 до 355 мм. Двигатели с высотами осей вращения до 71 мм выполняются на напряжение 380 В, остальные — 380 и 660 В при частоте 50 Гц, в экспортном исполнении — 60 Гц. Обозначения двигателей серии Пример базового обозначения: АИР100М4, где АИ — серия, Р — вариант увязки мощности с установочными размерами (может быть обозначение С), 100 — высота оси вращения, М — длина корпуса по установочным размерам, 4 — число полюсов. Пример основного обозначения: АИРБС100М4НПТ2, где АИР100М4 — базовое обозначение, Б — закрытое исполнение с естественным охлаждением без обдува, С — с повышенным скольжением, Н — малошумные, П — с повышенной точностью установочных размеров, Т — для тропического климата, 2 — категория размещения. Пример полного обозначения: АИРБС100М4НПТ2 220/380 В, 60 IМ2181, КЗ-11-3, F100, где 60 — частота сети, 1М2181 — исполнение по способу монтажа и концу вала, КЗ—11—3 — исполнение выводного устройства и количество штуцеров, F100 — исполнение фланцевого щита. Буквы IM — первые буквы английских слов International Mounting, означающих монтаж по международным нормам. Данные некоторых двигателей серии приведены в табл. 2.37. Типы и номера подшипников для двигателей серии АИ приведены в табл. 2.38. Выбор электродвигателей Тип, мощность и частота вращения двигателя для данного механизма обычно известны по паспорту установленного на нем двигателя, а если неизвестны, то потребная мощность двигателя рассчитывается по специальным формулам для каждого механизма. Таблица 2.37 ТЕХНИЧЕСКИЕ ДАННЫЕ НЕКОТОРЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ СЕРИИ АИ
Таблица 2.38 ПОДШИПНИКИ-ДВИГАТЕЛЕЙ СЕРИИ АИ
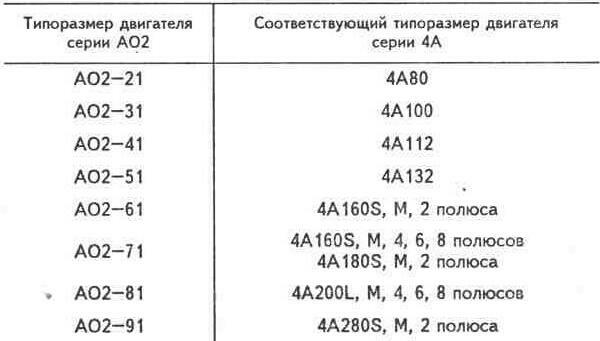
Частота вращения двигателя должна быть равна частоте. вращения, необходимой для приводимого механизма, если их валы соединяются непосредственно, или должна быть больше потребной частоты вращения механизма с учетом уменьшения ее редуктором, установленным между валами двигателя и механизма. Для выбора электродвигателя надо знать режим работы механизма, который он будет приводить в движение, и условия среды, в которой будут работать механизм с двигателем. Могут быть следующие режимы работы в соответствии с режимами работы приводимых механизмов. S1 — номинальный режим работы, при котором двигатель работает достаточно длительно с номинальной мощностью при достижении установившейся температуры. S2 —- кратковременный режим с длительностью периода неизменной номинальной нагрузки 10, 30, 60 и 90 мин. S3 — повторно-кратковременный режим с продолжительностью включения ПВ = 15, 25 и 60%, продолжительность одного цикла принимается равной 10 мин. S4 — повторно-кратковременный с частыми пусками, с ПВ = 15, 25, 40 и 60%, с числом включений в час 30, 60, 120 и 240 при коэффициенте инерции F = 1,2; 1,6; 2; 2,5; 4; 6,3 и 10, где коэффициент инерции F — отношение момента инерции нагрузки к моменту инерции ротора двигателя. S5 — повторно-кратковременный с частыми пусками и электрическим торможением с ПВ = 15, 25, 40 и 60%, с числом включений в час 30, 60, 120 и 240 при коэффициенте инерции F = 1,2; 1,6; 2; 2,5; 4. S6 — перемежающийся, с ПВ = 15, 25, 40 и 60%, продолжительность одного цикла 10 мин. S7 — перемежающийся с частыми реверсами при электрическом торможении, с числом реверсов в час 30, 60, 120 и 240 при коэффициенте инерции F = 1,2; 1,6; 2; 2,5; 4. S8 — перемежающийся с двумя или более частотами вращения, с числом циклов в час 30, 60, 120 и 240 при коэффициенте инерции F = 1,2; 1,6; 2; 2,5 и 4. Зная потребные мощность и частоту вращения двигателя, можно его выбрать по каталогу с ближайшей большей мощностью по сравнению с расчетной, но выбирать нужно из двигателей такого исполнения, которое соответствует условиям внешней среды, где будет установлен двигатель, и режиму работы механизма. Если нет двигателя в исполнении, соответствующем внешней среде, то приходится применять двигатель в нормальном исполнении, но тогда нужно принять меры для защиты его от влияния внешней среды (будка, навес, обертка целлофаном и т. д.), при этом важно не нарушить нормального охлаждения двигателя при работе. Монтаж двигателей Двигатель небольшой мощности, поступающий вместе с механизмом, обычно установлен на раме и соединен передачей с механизмом. Двигатели большой мощности для транспортировки снимаются и перевозятся отдельно. Для них также готово место на механизме или специальная рама, которая укрепляется болтами, приваривается и заливается бетоном. Монтаж двигателя в таких случаях заключается в установке его на подготовленное место, что делается силами собственного электрохозяйства или при большом объеме работ силами специализированных монтажных организаций. При этом двигатель укрепляется, присоединяется к механизму через имеющуюся передачу и присоединяется к электрической сети. Остальные работы выполняются при наладке. При монтаже двигателя прежде всего обращается внимание на положение осей валов двигателя и механизма. Если валы соединяются непосредственно, то их оси должны лежать на одной линии. Это лучше всего проверить по положению торцовых частей полумуфт: если они параллельны, то оси лежат на одной линии, при этом также должны совпадать боковые части полумуфт. Положение оси двигателя при креплении его на лапах можно регулировать подкладками под лапы около болтов крепления. При фланцевом креплении двигателя правильное положение осей обеспечивается равномерной затяжкой болтов крепления. Для предупреждения откручивания гаек и ослабления крепления двигателя под гайки подкладываются сначала обычные плоские шайбы, а на них пружинные. При отсутствии пружинных шайб могут применяться вторые гайки — контргайки. Замена двигателей Замена двигателей производится, когда они выходят из строя и снимаются для капитального ремонта. Сама замена не сложна, если готов такой же двигатель для замены. Но в электрохозяйстве может быть установлено множество двигателей различных типов и мощностей, поэтому для каждого двигателя может не быть такого же для замены. Но при наличии соответствующего двигателя для замены могут быть сложности, так как на валу двигателя может быть деталь для передачи вращения — шкив, звездочка, шестерня и т. д., и может оказаться, что ее не снять имеющимися средствами. В таком случае можно заменить только статор двигателя, оставив ротор с деталью для передачи вращения старым, вместе с передним щитом двигателя. Меняется только статор и в том случае, если вал двигателя имеет специальную конструкцию — удлиненный или с двумя рабочими концами, и нет двигателя с таким валом. Для двигателя с фланцевым креплением, не имеющего лап, можно установить статор с лапами, если они не будут мешать монтажу. Если у вышедшего из строя двигателя со сгоревшей изоляцией обмотки имеются дефекты подшипников, то можно заменить его статор при одновременной замене подшипников. При наличии дефектов вала и вышедшем из строя статоре меняется весь двигатель. При исправном статоре и вышедших из строя подшипниках или неисправном вале меняются подшипники или весь вал с подшипниками, взятый со старого двигателя такого же типа. При отсутствии взаимозаменяемых деталей двигателя приходится менять весь двигатель. При отсутствии для замены двигателя той же серии можно его заменить двигателем другой серии, при этом полезно знать взаимозаменяемые двигатели разных серий. В табл. 2.39 приводятся пары взаимозаменяемых двигателей серии А02 и 4А с одинаковыми диаметрами концов валов и окружностями крепления фланцев фланцевых двигателей. Таблица 2.39 ВЗАИМОЗАМЕНЯЕМЫЕ ДВИГАТЕЛИ
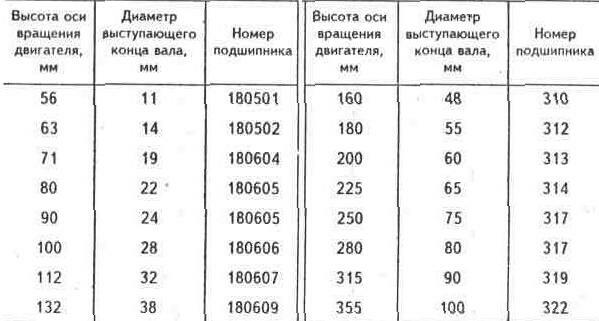
У последней пары двигателей не совпадают диаметры окружностей отверстий крепления фланцев. У двигателей серии 4А буквы S, М или L, М обозначают условные длины статора, при которых диаметры валов одинаковы, указаны число полюсов обмотки статора, при которых диаметры валов одинаковы. У остальных близких по мощности и частоте вращения двигателей диаметры валов не совпадают. При этом не следует пытаться заменить только статор, потому что у разных серий двигателей, хотя они близки по параметрам, статоры разные. Если диаметр вала двигателя не совпадает с диаметром отверстия насаживаемой на этот вал детали, то его нужно привести в соответствие с этой деталью или наоборот. Если диаметр вала больше, то его можно обточить на токарном станке, а потом сделать новую шпоночную канавку. При этом если двигатель помещается на токарном станке без разборки, то его можно не разбирать. Отверстие детали, насаживаемой на вал, можно рассверлить или расточить и сделать новую шпоночную канавку. Если диаметр вала меньше, чем отверстие насаживаемой на него детали, то можно напрессовать на него или запрессовать в отверстие насаживаемой детали втулку и сделать в ней шпоночную канавку. Если из-за малой разницы размеров вала и отверстия втулку выточить нельзя, то можно ее сделать из листового железа. Близкие по техническим данным двигатели разных серий имеют разные высоты осей вращения. Допустим, высота оси вращения нового двигателя больше высоты оси вращения старого. Если при этом оси двигателя и вала механизма находятся на одной линии, то нужно опускать раму двигателя, если позволяют условия. При невозможности опустить раму двигателя нужно поднимать механизм, приводимый в движение этим двигателем, на величину разницы высот осей вращения двигателя и механизма. Если высота оси вращения нового двигателя меньше, чем старого, то можно подложить под него подкладки или поднять его раму. Если оси двигателя и механизма параллельны, то новый двигатель можно сдвинуть параллельно в плоскости рамы или с самой рамой. Как правило, у двигателей разных серий с близкими по значению мощностями и частотами вращения не совпадают расстояния между отверстиями крепления на лапах, а у некоторых и на фланцах. В таких случаях на раме просверливаются новые отверстия. Если размеры рамы не позволяют сделать этого, то к раме можно приварить дополнительные плоскости для отверстий. При сильном расхождении мест крепления старого и нового двигателя можно применить промежуточную плиту из толстого листового железа, в которой сделать отверстия для креплений к ней двигателя и отверстия для крепления плиты к старой раме. При обработке отверстия детали, насаживаемой на новый двигатель, важно знать диаметр рабочего конца вала нового двигателя. В табл. 2.40 показаны диаметры рабочих концов валов двигателей серии 4 А при данных высотах осей вращения. При этом для двигателей с высотой оси вращения до 132 мм диаметры концов валов для всех частот вращения одинаковы, а с высотами оси вращения 160 мм и более двигатели с частотой вращения 3000 об/мин имеют меньшие диаметры концов валов, чем двигатели на другие частоты вращения. Таблица 2.40 ДИАМЕТРЫ (d) РАБОЧИХ КОНЦОВ ВАЛОВ ДВИГАТЕЛЕЙ СЕРИИ 4А В ЗАВИСИМОСТИ ОТ ВЫСОТ ОСЕЙ ВРАЩЕНИЯ (h)
Подготовка двигателей к включению в сеть и к работе После монтажа нового двигателя вместе с новым механизмом или после замены двигателя производится его подготовка к включению с целью выявления неисправностей и дефектов монтажа не только двигателя, но и электрического и механического оборудования, с ним связанного. При больших объемах работ подготовка к включению производится при наладке электрического и механического оборудования силами специализированных пуско-наладочных организаций по специальной программе. При подготовке двигателей к включению и к работе производится: внешний осмотр; проверка схемы соединения обмоток; измерение сопротивления изоляции пробный пуск двигателя; проверка работы двигателя на холостом ходу и под нагрузкой. Внешний осмотр При внешнем осмотре проверяются: соответствие данных паспорта электродвигателя проекту, механизму и условиям окружающей среды в месте работы двигателя; отсутствие механических повреждений корпуса, коробки выводов, вентилятора охлаждения; отсутствие повреждений подводящих проводов (нарушений изоляции, скрытых под изоляцией обрывов и изломов); возможность вращения вала от руки, отсутствие заеданий и торможений; вращение ротора проверяется воздействием на деталь, установленную на валу или, при ее недоступности, на вентилятор двигателя. Если ротор двигателя не вращается, то нужно отсоединить механизм, так как причина может быть в нем. Если ротор двигателя, отсоединенного от механизма, не вращается, то это означает, что он заклинен. Заклинивание может произойти при падении двигателя при неосторожной погрузке или разгрузке, от ржавчины в воздушном зазоре между статором и ротором в результате хранения в условиях повышенной влажности, от ржавчины в подшипниках при плохой смазке и наличии сырости. При заклинивании ротора двигатель должен быть разобран, найдена и устранена причина заклинивания; наличие заземляющих проводников от электродвигателя до места присоединения к сети заземления. Проверка схемы соединения обмоток Большинство двигателей в коробках зажимов имеют шесть выводов, соответствующих началам и концам их фазных обмоток. Обозначения выводов электрических машин, соответствующие стандарту, показаны в табл. 2.45, 2.46. Обычно выводы всех фаз обмотки статора двигателя расположены в коробке зажимов согласно рис. 2.17, а. Такое расположение дает возможность получить соединение фазных обмоток статора в звезду при соединении горизонтально перемычками нижних зажимов и в треугольник при соединении вертикальных пар зажимов (рис. 2.17, б, в). В некоторых двигателях обмотки фаз статора соединены в звезду и в коробке зажимов находятся только выводы С1, С2 и С3. Следует учесть, что выводные концы обмоток фаз двигателя одеваются на шпильки и прижимаются гайками, которые могут быть слабо затянуты, поэтому нужно проверять крепление выводных концов их пошатыванием. При слабом креплении этих концов нужно отсоединять подводящие провода и перемычки и затягивать гайки крепления выводных концов обмотки двигателя.
Рис. 2.17. Выводы обмоток статора трехфазного асинхронного электродвигателя: а) схема присоединения начал и концов обмоток к зажимам колодки в выводной коробке; б) схема включения обмоток статора в звезду и соединение выводных зажимов; в) схема включения обмоток статора в треугольник и соединение выводных зажимов. Измерение сопротивления изоляции Об измерении сопротивления изоляции рассказано в гл. 5. Величина сопротивления изоляции электродвигателя согласно ПУЭ не нормируется, но в стандарте указано, что величина сопротивления изоляции электрических машин должна быть не менее 1 кОм на 1 В номинального напряжения машины. Пробный пуск двигателя Электродвигатель включают на 2...3 с и проверяют: направление вращения; работу вращающихся частей двигателя и вращающихся и движущихся частей механизма; действие пусковой аппаратуры. При любых признаках неисправности электрической или механической части двигатель останавливается и неисправности устраняются. Нужное направление вращения механизма бывает на нем обозначено стрелкой. Нужно также помнить, что при правильном направлении вращения рабочих колес турбомашин (насосов, вентиляторов и т. д.) их лопатки загнуты назад относительно направления вращения. Правильное направление вращения двигателей транспортирующих машин (транспортеров, шнековых и ковшовых подъемников и др.) определяется по движению их рабочих органов. Для изменения вращения двигателя достаточно отсоединить от зажимов два провода, подводящих напряжение к двигателю, поменять их местами и снова присоединить. Обычно это делается на выходе пускового аппарата. Кратковременное включение повторяют 2—3 раза, увеличивая продолжительность включения. Проверка электродвигателя на холостом ходу и под нагрузкой Проверку электродвигателя на холостом ходу производят при отсоединенном механизме. Если отсоединить механизм нельзя, то проводится проверка при ненагруженном механизме. Продолжительность проверки — 1ч. При этом проверяют нагрев подшипников, корпуса двигателя, наличие вибрации, характер шума подшипников. При ненормальном шуме подшипников и их перегреве двигатель приходится разбирать и устранять причину. При невозможности устранить причину ненормальной работы подшипника он заменяется. При повышенном нагреве корпуса двигателя (большем, чем у других нормально работающих двигателей) он останавливается и производится проверка прилегания контактов в аппаратах, через которые подводится напряжение к двигателю, проверка плотности затягивания зажимов проводов, начиная от выводных концов в коробке двигателя. При исправности цепи, подводящей напряжение к двигателю, и его повышенном нагреве он должен отправляться в капитальный ремонт. Перед этим у него должно быть проверено соответствие обозначений выводных концов фазных обмоток, измерено сопротивление обмоток постоянному току, что делается при наладке опытными специалистами. О других неисправностях и их устранении можно узнать ниже по табл. 2.44, далее рассказано об устранении вибраций. После проверки двигателя на холостом ходу начинается его проверка под нагрузкой. При нормальной работе двигателя в течение 20...30 мин с механизмом далее продолжается его обкатка вместе с механизмом не менее 8 ч. При этом прирабатываются подвижные детали механизмов, проверяется на нагрев электрооборудование, выявляются его слабые места. Режим обкатки определяется механиками, производившими монтаж технологического оборудования. Способы пуска в ход асинхронных двигателей Схемы пуска двигателей в ход должны предусматривать создание большого пускового момента при небольшом пусковом токе и, следовательно, при небольшом падении напряжения при пуске. При этом может требоваться плавный пуск, повышенный пусковой момент и т. д. На практике применяются следующие способы пуска: непосредственное присоединение к сети — прямой пуск; понижение напряжения при пуске; включение сопротивления в цепь ротора в двигателях с фазовым ротором. Прямой пуск Прямой пуск применяется для двигателей с короткозамкнутым ротором. Для этого они проектируются так, чтобы пусковые токи, протекающие в обмотке статора, не создавали больших механических усилий в обмотках и не приводили к их перегреву. Но при прямом пуске двигателей большой мощности в сети могут возникать недопустимые, более 15%, падения напряжения, что приводит к неустойчивой работе пусковой аппаратуры (дребезжание), подгоранию контактов и практически к невозможности пуска. Такие явления могут быть в маломощной сети или при большом удалении от подстанции пускаемого двигателя. Прямой пуск двигателя от маломощной сети В маломощной сети условия пуска двигателя ухудшаются для самого двигателя, ухудшается работа уже включенных двигателей и ламп накаливания, поэтому должны быть ограничения по мощности двигателя в зависимости от вида нагрузки сети и количества пусков двигателя. Существуют следующие ограничения мощности двигателя. Трансформатор, питающий чисто силовую сеть: 20% мощности трансформатора при частых пусках; 30% мощности трансформатора при редких пусках. Трансформатор имеет смешанную нагрузку: 4% мощности трансформатора при частых пусках; 8% мощности трансформатора при редких пусках. Электростанция малой мощности — 12% мощности электростанции. В маломощных сетях следует ограничивать число пусков сравнительно мощных двигателей, при затруднении их пуска по возможности отключать другие двигатели. Пуск при пониженном напряжении Этот способ пуска применяется для двигателей средней и большой мощности при ограниченной мощности сети. Рассмотрим некоторые способы понижения напряжения при пуске. Переключение обмотки статора двигателя с пусковой схемы звезда на рабочую схему треугольник Для лучшего понимания способа пуска разберем схемы соединения обмоток двигателей и влияние этих схем на величину фазного напряжения двигателя при заданном линейном напряжении. Обмотки двигателей могут соединяться звездой или треугольником. Тип соединения определяет соотношение между напряжением на зажимах двигателя и напряжением на фазах его обмотки, т. е. номинальным напряжением двигателя. Напряжение на зажимах двигателя измеряется между его зажимами и называется линейным, и на фазе обмотки — между ее началом и концом и называется фазным. Как известно, при соединении треугольником напряжения линейное и фазное равны, а при соединении звездой линейное напряжение больше фазного в 3^-0.5 раз. Двигатель может иметь в коробке зажимов три или шесть концов. При наличии шести концов возможно соединение двигателя звездой или треугольником в зависимости от напряжения сети, к которой будет присоединяться двигатель, и его номинального напряжения. Если номинальное напряжение двигателя 220 В, то при линейном напряжении сети 380 В его нужно соединять звездой, а при линейном напряжении сети 220 в — треугольником. При номинальном напряжении двигателя 380 В и линейном напряжении сети 380 В двигатель нужно соединять треугольником, а при линейном напряжении сети 660 В — звездой. Как соединять выводные концы двигателя при различных схемах соединения его обмоток, видно из схем соединение обмоток, показанных на рис. 2.17, б, в, где указаны стандартные обозначения концов и начал фазных обмоток двигателя. Если в коробке зажимов двигателя имеется три вывода обмоток с зажимами, то он имеет определенную схему соединения обмоток в зависимости от напряжения, на которое он рассчитан. Схема пуска двигателя включением на пусковую схему звезда и с переключением на рабочую схему треугольник показана на рис. 2.18.
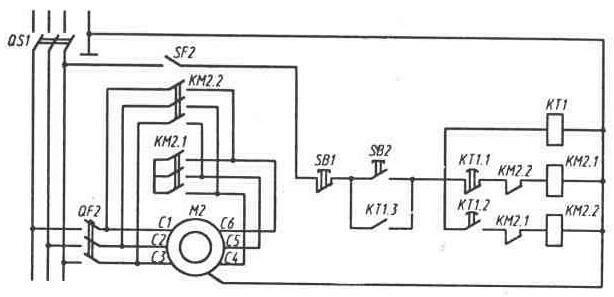
Рис. 2.18. Схема пуска трехфазного асинхронного электродвигателя включением на пусковую схему «звезда» и с переключением на рабочую схему «треугольник»: SB1— кнопка КМЕ4201 (красная); SB2— кнопка КМЕ4201 (черная); КМ2.1, КМ2.2— пускатель ПМА-3100У4, 220 В; КТ1 — промежуточное реле РПЛ2204, 220 В, пневмоприставка ПВЛ1104; М2 — электродвигатель А02-72-2,30 кВт, 2910 об/мин; QF2 —выключатель автоматический АЕ2046, 63 A; SF2 —выключатель автоматический А63, 4 A; QS1 —выключатель пакетный ПВЗ—100. Перед пуском двигателя включаются выключатели QS1, QF2 и SF2. При нажатии на кнопку SB2 включается пускатель КМ2.1, соединяющий концы фазных обмоток двигателя в звезду. Одновременно включается реле времени КТ1, замыкая контакт КТ1.3, шунтирующий контакты кнопки SB2. С выдержкой времени, необходимой для разгона двигателя, отключается контакт КТ1.1 реле времени, отключая пускатель КМ2.1, и включается контакт КТ1.2, включающий пускатель КМ2.2, переключающий концы фазных обмоток двигателя на треугольник, и двигатель продолжает работать. Так как при пуске двигателя при подключении по схеме звезда фазное напряжение обмотки уменьшается в 3^0.5 раз по сравнению со схемой треугольник, то фазные токи также уменьшаются в 3^-0.5 раз, которые равны линейным токам при этой схеме. Но при схеме треугольник, являющейся рабочей в данном случае, фазные токи меньше линейных в 3^-0.5 раз, а при пусковой схеме звезда получается еще уменьшение фазных токов в 3^-0.5 раз, и в результате линейные токи, равные фазным при пусковой схеме звезда, уменьшаются в 3 раза. После разгона двигателя обмотка его статора переключается на нормальную схему треугольник, поэтому схема пуска двигателя кратко называется схемой пуска переключением со звезды на треугольник.
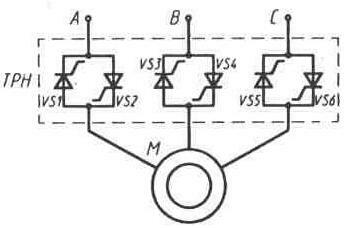
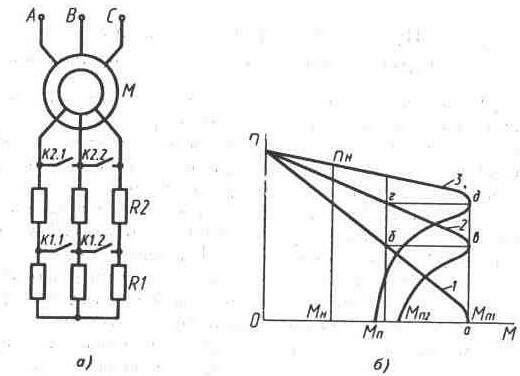
Рис. 2.19. Схема пуска трехфазного асинхронного электродвигателя с помощью тиристорного регулятора напряжения (ТРН). Пуск электродвигателя с помощью тиристорного регулятора напряжения Схема включения двигателя с помощью тиристорного регулятора напряжения представлена на рис. 2.19. В регуляторе напряжения в каждый фазный провод включаются встречно-параллельно два тиристора, один из которых работает условно в положительный полупериод напряжения сети, а другой в отрицательный. Регулирование напряжения на выходе регулятора осуществляется изменением времени включения каждого тиристора относительно момента, когда ток должен переходить с одного из трех тиристоров на другой (базовая точка), путем подачи на тиристор управляющего импульса, что дает возможность изменять время протекания тока через тиристор в течение полупериода напряжения сети и напряжение на его выходе, подаваемое на нагрузку, в данном случае на двигатель. Это напряжение не является синусоидальным, и его можно представить как среднее напряжение, которое можно менять, изменяя продолжительность работы тиристора в течение полупериода. Время включения тиристора относительно базовой точки выражается в градусах и называется углом регулирования [7]. Изменяя угол регулирования тиристоров, можно получить необходимое напряжение для плавного пуски двигателя. Пуск электродвигателя с фазовым ротором Схема включения двигателя с фазовым ротором и получаемые при пуске механические характеристики показаны на рис. 2.20. Двигатель имеет контактные кольца, которые позволяют включать в цепь ротора при пуске добавочные сопротивления R1 и R2. В начале пуска включены обе ступени сопротивлений, при этом получается наибольший пусковой момент Мп1, разгон происходит по механической характеристике 1, частота вращения увеличивается, но не достигает номинальной и в точке б происходит отключение первой ступени сопротивлений R1 контроллером при замыкании контактов К1.1 и К1.2. При постоянной частоте вращения происходит увеличение пускового момента до Мп1 и снова разгон по характеристике 2 с более высокой частотой вращения. В точке г отключается вторая ступень R2 сопротивлений контактами К2.1 и К.2.2 и происходит переход на естественную механическую характеристику 3. Далее работа двигателя происходит при номинальной частоте вращения nн и при номинальном моменте Мн.
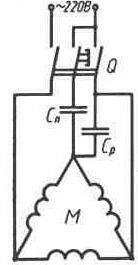
Рис. 2.20. Включение асинхронного электродвигателя с фазовым ротором: а) схема включения; б) механические характеристики при пуске; R1, R2 — ступени сопротивлений, К1.1, К1.2, К2.1, К2.2 — контакты переключателя. При пуске двигателя происходит не только уменьшение пусковых токов, но и увеличение пускового момента, что важно для двигателей, которые включаются под нагрузкой (различные транспортные приспособления и машины). Работа трехфазного двигателя в однофазной сети На практике может потребоваться применение трехфазного двигателя в однофазной сети, например, при выходе из строя двигателя стиральной машины или другой бытовой машины, когда замены нет, а есть трехфазный двигатель. Одна из схем такого применения показана на рис. 2.21, где к двум вершинам треугольника подводится напряжение сети, равное 220 В, а к третьей — пусковая емкость Сп через контакт выключателя, замыкающийся на время пуска двигателя для создания пускового момента, и рабочая емкость Ср, включаемая на все время работы двигателя. Соединение обмоток двигателя треугольником предпочтительнее, так как при этом к фазной обмотке двигателя подводится напряжение, равное напряжению сети, большее, чем при соединении звездой, и получается большой крутящий момент.
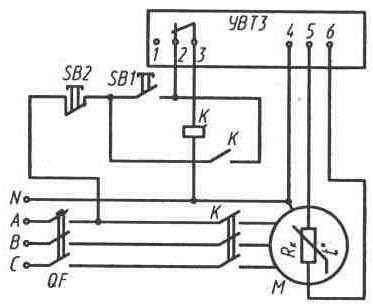
Рис. 2.21. Применение трехфазного двигателя в однофазной сети: Q — выключатель неавтоматический, имеющий средний контакт с самовозвратом, Сп, Ср — емкости пусковая и рабочая. При напряжении сети 220 В и частоте сети 50 Гц рабочая емкость, мкф, Ср = 66Рн, где Pн. — номинальная мощность двигателя, кВт. Пусковая емкость, мкф Сп = 2Ср = 132Рн. Если двигатель запускается без пусковой емкости, то ее можно не применять. Средства защиты электродвигателей Основные причины выхода двигателей из строя Защита электродвигателей означает их автоматическое отключение пуско-защитными аппаратами с целью предотвращения выхода из строя при увеличении токов в обмотках выше допустимых. Выход из строя двигателя в большинстве случаев означает полное или частичное обугливание изоляции его обмотки при нагреве обмоточного провода большим током. Большой, свыше номинального, ток в обмотке двигателя появляется при длительной перегрузке его механизмом, при заклинивании механизма, а также при несимметрии напряжений в питающих проводах, зависящих от состояния сети, т. е. при аварийных режимах в сети. Одно из первых мест среди аварийных режимов занимает обрыв фазного провода в цепи питания двигателя. Обрыв может быть на линиях высокого и низкого напряжений, при обгорании контактов или зажимов в аппаратах высокого и низкого напряжений, при повреждении кабелей или проводов питания двигателей, обгорании зажимов на самом двигателе. При обрыве фазного провода двигатель не запускается или при работе он останавливается и его обмотка обугливается. Защита электродвигателей осуществляется аппаратами, которые рассмотрены в п. 2.9, поэтому не будем возвращаться к их конструкции и принципу действия, а рассмотрим особенности защиты двигателей различными аппаратами и действенность этой защиты. Реле тепловые Распространенной защитой электродвигателей является защита тепловыми реле, которые монтируются в корпусах пускателей, если пускатели устанавливаются отдельно, или шкафах и на щитах. Правильно подобранные тепловые реле защищают двигатель от перегрузки, заклинивания, потери фазы, хотя предназначены они для защиты от перегрузки. Недостаток защиты тепловыми реле заключается в том, что трудно подобрать реле из имеющихся в наличии для каждого двигателя так, чтобы ток теплового элемента реле соответствовал току двигателя. Также следует учесть, что тепловые реле сами требуют защиты от тока короткого замыкания. Если соответствуют друг другу токи двигателя и уставки реле, это не значит, что реле надежно сработает, так как имеется разброс параметров реле с уставкой на один и тот же ток, поэтому реле нужно регулировать на специальном стенде, что не всегда возможно из-за отсутствия стендов и грамотных специалистов. Защита реле тепловыми показана на рис. 11.8, где ККЗ — тепловые элементы реле в силовой цепи двигателя и контакты реле в его цепи управления. Реле максимального тока (максимальные реле) Максимальные реле применяются для защиты двигателей механизмов, которые могут заклиниваться во время работы, например, дозаторов, транспортеров. Эти реле могут защитить двигатель и от потери фазы. Защита с помощью реле максимального тока показана на рис. 11.8, где ККЗ — обмотка реле в силовой цепи двигателя и контакты реле в цепи управления двигателя. Автоматические выключатели (автоматы) Автоматы применяются для защиты двигателей, так как имеют расцепители максимального тока и тепловые расцепители, по принципу работы соответствующие максимальным и тепловым реле. Следует учесть, что не все автоматы имеют расцепители и поэтому не все они могут защитить двигатель от перегрузки. В схеме защиты автоматы обычно устанавливаются перед пускателем (рис. 11.8), где автомат QF2 служит для включения и отключения проводов и аппаратов, расположенных за ним по ходу электроэнергии в направлении двигателя, для защиты этих проводов и аппаратов от тока короткого замыкания и двигателя от тока короткого замыкания и перегрузки. Устройства встроенной тепловой защиты (УВТЗ) Устройство отключает пускатель электродвигателя, когда температура обмоток двигателя становится больше допустимой для данного типа изоляции обмоток двигателя. Устройство состоит из электронного блока и датчиков. Датчики устанавливаются в лобовых частях обмотки двигателя (по одному на каждую фазу). Температурными датчиками служат полупроводниковые термосопротивления — позисторы. Схема внешних соединений при данном виде защиты показана на рис. 2.22. При повышении температуры обмотки двигателя увеличивается сопротивление встроенного резистора Rк, которое воздействует на электронную схему электронного блока, в результате чего размыкаются контакты 2-3 реле, находящегося в электронном блоке, и отключают катушку пускателя К.
Рис. 2.22. Схема внешних соединений устройства встроенной тепловой защиты электродвигателя (УВТЗ): QF— выключатель автоматический, SB1, SB2— контакты кнопки управления, К- пускатель магнитный, Rk — датчик температуры, 1, 2, 3, 4, 5, 6 — зажимы в цепи устройства. Недостатком данного вида защиты является то, что с датчиками выпускаются не все двигатели, и датчики могут устанавливаться в условиях ремонтных мастерских, поэтому при замене двигателей может не оказаться двигателей с датчиками, защита данного вида будет бездействовать, и придется устанавливать другую. При данном виде защиты приходится отдельно приобретать специальные электронные блоки и датчики. Защита реагирует не на причину аварийного состояния двигателя — большой ток, а на последствия этого состояния — нагрев обмотки двигателя, поэтому она может быть неэффективной с учетом инерции процессов. Фазочувствительное устройство защиты (ФУЗ) Как следует из названия, в данной защите контролируется не ток двигателя, а угол сдвига фаз между линейными токами двигателя, величина которого при аварийном режиме будет отличаться от величины его в нормальном состоянии. Угол сдвига фаз между токами в трехфазной сети в нормальных условиях равен 120°, а при обрыве в одном фазном проводе угол сдвига фаз между токами в исправных проводах становится равным 180°. Значит, если контролировать изменение угла сдвига фаз между токами в проводах, подводящих ток к электродвигателю, то двигатель можно защитить от последствий обрыва фазного провода.
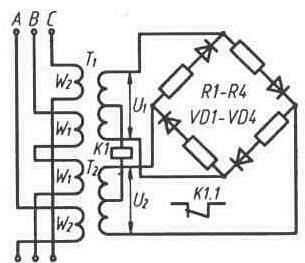
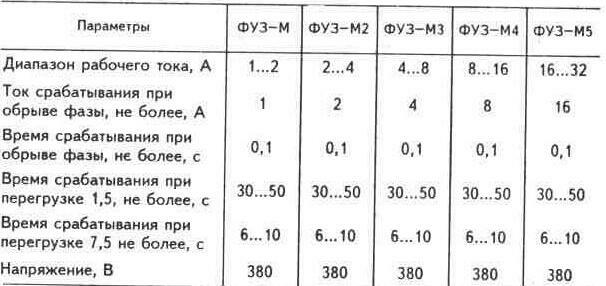
Рис. 2.23. Схема, поясняющая принцип действия фазочувствительного устройства защиты электродвигателей (ФУЗ): Т1, Т2 — трансформаторы, К1 — реле. Принцип действия устройства показывает простейшая схема на рис. 2.23. В схеме имеется датчик в виде моста из диодов VD1—VD4 и резисторов R1—R4. Для получения сигнала, принимаемого датчиком, формируются два напряжения U1, и U2 с определенным углом сдвига фаз между ними, который учитывается датчиком. Для получения этих напряжений применяются трансформаторы Т1 и Т2, включаемые в цепь питания двигателя. К датчику через вторичные обмотки трансформаторов присоединено реле К1, которое своими контактами К1.1 отключает магнитный пускатель двигателя при аварийное режиме. При невозможности запускания или заклинивания двигателя, обрыве фазного провода токи нагрузки и измеряемые напряжения U1 и U2 увеличиваются, ток в катушке реле возрастает и становится больше тока срабатывания реле, и оно срабатывает, отключая двигатель. Технические данные некоторых устройств ФУЗ представлены в табл. 2.41. Неисправности и отказы асинхронных двигателей с учетом неисправностей в цепи их питания и перегрузок показаны в табл. 2.44. Таблица 2.41 ТЕХНИЧЕСКИЕ ДАННЫЕ УСТРОЙСТВ ФУЗ-М
|

|
|
|